



Гидроакустические средства являются наиболее эффективным инструментом подводных исследований и могут применяться в системах дистанционного зондирования состояния водных акваторий [1-3]. При этом достаточно эффективным является применение унифицированных гидроакустических средств, обеспечивающих работу в любых плавучих средствах и имеющих наглядное представление информации для потребителя. В настоящее время для контроля системы подводных трубопроводов и других коммуникаций и определения их состояния часто используется гидролокатор бокового обзор. В статье рассматривается гидролокатор бокового обзора, разработанный в АНАКА [3]. Этот гидролокатор использовался для определения расположения и контроля состояния системы подводных трубопроводов в районе месторождения "Бахар" в шельфовой зоне Каспийского моря, а также для изучения дна реки Кура. Обобщенная блок-схема гидролокатора представлена на рис.1.
Принцип работы гидролокационной системы заключается в следующем: для размещения гидроакустических антенн используется подводный носитель в виде снаряда обтекаемой формы, по обеим сторонам этого носителя под определенным углом размещаются две приемопередающие совмещенные антенны, которые выполнены в виде линеек с пьезоэлементами
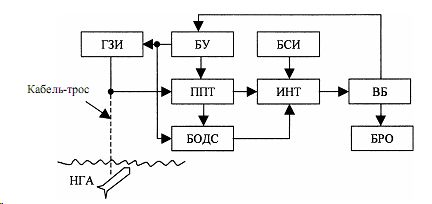
Рис. 1. Обобщенная блок-схема гидролокационной системы. НГА носитель гидроакустических антенн, ГЗИ генератор зондирующих импульсов, БУ блок управления, ППТ приемопреобразовательный тракт, БОДС блок обнаружения донного сигнала, ИНТ интерфейс ввода в ЭВМ, ВБ вычислительный блок, БРО блок регистрации и отображения, БСИ блок статусной информации.
Угол наклона этих антенн обеспечивает обзор полосы дна моря, симметричный относительно направлению движения. Рассматриваемая антенна характеризуется диаграммой направленности, главный лепесток которой в горизонтальной плоскости составляет φг =900 , а в вертикальной φг =450 . На рис. 2а показана схема участка дна моря, находящегося в зоне обозрения антенны.
При одновременной работе гидролокаторов левого и правого бортов для определения сигнала донного отражения используется блок обнаружения донного сигнала. Значение высоты носителя антенны над уровнем дна является основным параметром, определяющим параметры управления гидролокатора, а именно [4,5]:
частоту следования зондирующих импульсов в соответствии с выражением
![]()
длительность зондирующего импульса согласно
![]()
мощность зондирующего импульса (напряжение) согласно
![]()
полосу пропускания фильтров приемопреобразовательного тракта согласно

где с - скорость звука в воде, h - текущее значение высоты антенны над уровнем дна, N - количество отсчетов отраженного сигнала в серии вырабатываемой в процессе одного цикла зондирования, V - дисперсия напряжения на выходе излучающей антенны, Kv - чувствительность антенны по напряжению, I0-интенсивность излучения антенны на единичном расстоянии.
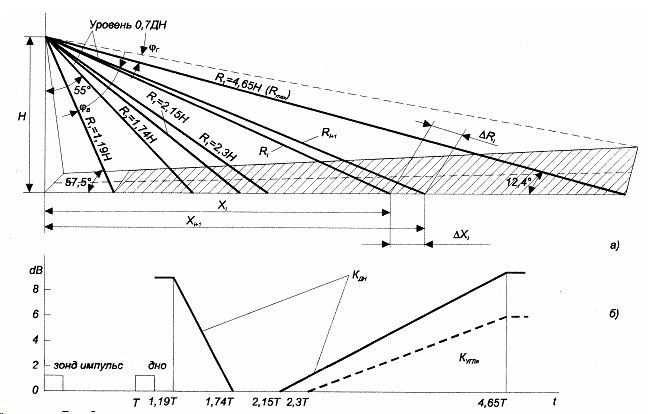
Рис. 2. Временные диаграммы и схема участка дна
Обработка информации на ЭВМ осуществляется с помощью специально разработанного пакета программного обеспечения. Для этого применяются программы коррекции изображения по углу скольжения акустического луча, а также коррекции неравномерности диаграммы направленности приемной антенны. Она зависит от текущей высоты носителя антенны над поверхностью дна. Программы коррекции неравномерности диаграммы направленности и угловой коррекции работают в реальном масштабе времени. Запуск поправочных коэффициентов осуществляется после определения сигнала донного отражения.
Временные диаграммы работы программ угловой коррекции и коррекции неравномерности диаграммы направленности приведены на рис.2б. Здесь Кугл и Кдн соответственно, поправочные коэффициенты при угловой коррекции и при коррекции по диаграмме направленности, Т интервал времени между зондирующим и донным импульсами. Интервал времени 1,19Т характеризует начало зоны обзора гидролокатора, 4,65Т - конец этой зоны, 1,74Т и 2,15Т -соответственно, начало и конец зоны, где чувствительность антенны максимальна.
Алгоритмы программ угловой коррекции и коррекции неравномерности диаграммы направленности приведены на рис.3. Эти программы могут быть использованы как в реальном масштабе времени, так и при обработке архивных гидроакустических изображений. Природа возникновения геометрических искажений при выводе изображения (акустического плана) поясняется с помощью рис.2а. При постоянной частоте дискретизации входного сигнала на эхограммах приращения наклонной дальности ΔR(i)= const, где i - номер отсчета вдоль строки изображения.Однако приращения горизонтальной дальности ΔX (i) являются монотонно убывающей функцией от i. При угле a min = 12,40 и числе отсчетов в строке n=256 отношение ΔX(1) /ΔX(255) =11,6.
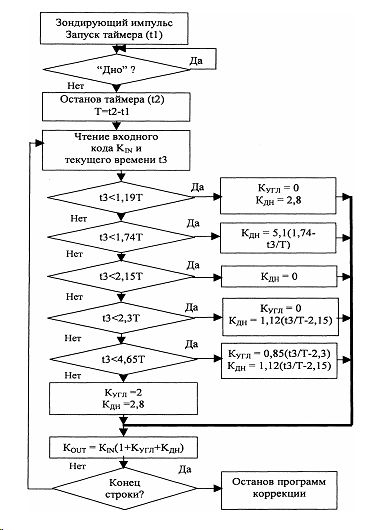
Рис. 3. Алгоритм программ коррекции.
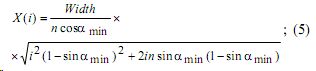
Следовательно, все отсчеты должны быть смещены к началу строки. С учетом выше сказанного, позиция отображения i-го отсчета на изображении длиной Width рассчитывается по формуле
На рис.4 приводится карта расположения нефтегазопроводов в районе месторождения «Бахар», составленная по результатам гидроакустических съемок, во время которых использовалась рассматриваемая гидроакустическая система. На фрагменте II рисунка приводится вертикальный профиль расположения трубопровода. В районе пересечения двух труб определена утечка углеводородного сырья из одной коммуникаций. Таким образом, применение данной гидроакустической системы позволяет также контролировать состояние подводных коммуникаций и соответственно, экологическую ситуацию в этих районах.
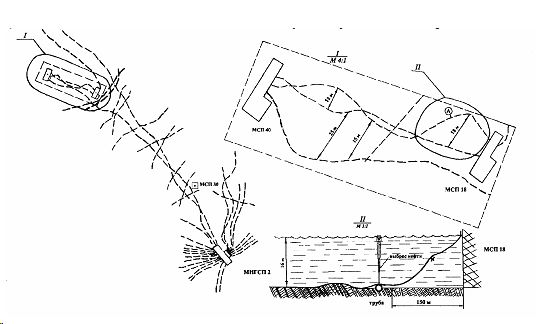
Рис. 4. Карта расположения нефтегазопроводов
Литература
- Антокольский Л.М.,Пронин С.В., Шахов М.Н. Разработка гидроакустического комплекса для обследования акваторий на основе гидролокатора бокового обзора // Акуст. журн. 1994. Т.40. №2. С.323
- Parkinson A.F., Anstee S.D. Bottom backscatterr measurements at 100 and 200 kHz with high angular resolution // J. Acoust. Soc. Amer. 1996. V.99. №4. P.2499-2500
- А.с. №1230427 G01 S15/89, БИ №22, 1986 (СССР). Гидролокационная система регистрации и обработки информации / Т.К.Исмайлов, Т.И.Низамов и др.
- Самойлов Л.К. Электронное управление характеристиками направленности антенн, Л.:Судостроение, 1987. 328с.
- Урик Р.Дж. Основы гидроакустики. Л.:Судостроение, 1978. 247с.